
BWR and PWR nuclear plant operators effectively reduce personnel dose by decontaminating the surfaces of the refueling cavity, dryer and separator pools, and components within these spaces. Plant operators have employed several methods to handle this task; however, the results vary in effectiveness for meeting ALARA and decontamination coverage goals. Faced with these challenges, many nuclear utilities are constantly seeking to improve decontamination methods and tooling.
For this reason, FirstEnergy Nuclear Operating Company (FENOC) approached Diakont to develop an improved underwater robotic decontamination tool. Some of FENOC’s requirements included operation in parallel with other activities, having the mobility to swim/navigate throughout the refueling cavity, adhering to walls, floors, and curved surfaces, and reliable and effective surface decontamination such that manual scrubbing is not required.
During the Spring 2017 outage, FENOC’s Perry Nuclear Power Plant in Ohio completed its first successful underwater decontamination using the newly developed decon tool, achieving its ALARA goals and saving time over previous methods.. Producing 1,268 megawatts of electricity (enough to power more than 1 million homes), the BWR-6 at the Perry site is one of the largest single-unit plants in the United States.
Challenge
- Decontaminate the Perry Nuclear Power Plant cavity during Spring 2017refueling outage.
- Reduce personnel dose exposure, radwaste, decontamination time, and cost from previous years without raising the risk of contamination spreading and altering plant chemistry.
Solution
- Use Diakont’s robotic decontamination tooling while cavities are flooded, in parallel with fuel movement and other activities.
Results
- A successful decontamination job resulting in no additional manual cavity decontamination after drain down. ALARA goals were also achieved while time and cost were saved from previous methods.
- Preliminary surveys indicated that all contamination levels were reduced to <50k dpm/100 cm2 helping the utility meet their INPO/industry collective radiation exposure goal as well as reduce personnel dose exposure.
- Plant personnel at Perry Nuclear Power Plant plan on using the tool to examine underwater boots next summer in the suppression pool.
Established Decontamination Methods
Historically, nuclear plant operators conducted cleaning and decontamination of refueling cavity surfaces by one of five methods: manual scrubbing, the use of strippable coatings, high-pressure washing, hydrolasing, and automated decontamination using robotic tooling. Each of these methods can be effective, but there are advantages and disadvantages of each.
Manual scrubbing is a straightforward procedure that doesn’t require expensive equipment or training, however, this method results in extensive personnel dose exposure, requires drain down, and the decontamination results can vary.
The use of strippable coatings is an effective decontamination method since the coatings seal any contaminants in place, which are then stripped away. This method is costly and requires trained personnel for the application and removal of the coatings. It also produces considerable radiological waste. The strippable coating is often applied manually, resulting in relatively high dose exposure during application, and generally requires curing time thereafter, making it one of the most time-consuming decontamination methods.
High-pressure washing is typically done from the pool edge using a high pressure (i.e. 3000 psi) handheld gun or wand which is held close to the decontamination surface. This method is quite widespread throughout the US nuclear industry, but it has disadvantages: the addition of water in the reactor cavity has the potential to alter chemistry, particularly impacting boron concentration in PWR plants, and has the potential to spread contaminants or create airborne activity.
Similar to high-pressure washing, hydrolasing also uses water to blast the cavity surfaces, except with much greater force. Using the greater force of the water jet, hydrolasing delivers decontamination results using less water, yet it still has the potential to impact boron concentrations in PWRs. The powerful jet can also cause personnel injury if used improperly.
Most automated decontamination systems perform reliable decontamination and require fewer staff resources than manual methods, resulting in greatly reduced personnel dose exposure. However, these tools only work on flat surfaces or require the constant use of an auxiliary hook, boom, rail, or primary overhead crane while performing decontamination. These tools also provide inconsistent decon results. Some of the tools require modifying the tool outside of the pool in order to switch from cleaning the floor to walls, and vice versa, and the brush change-out can be time consuming as well.
The underwater robotic decon solution developed by Diakont presents a substantial improvement over historical cavity decon methods because it can reduce personnel dose exposure, reduce radwaste, doesn’t impact plant chemistry, doesn’t risk inadvertently spreading contamination, and eliminates the risk of personnel injury and component damage associated with hydrolasing. Most importantly, by performing decontamination robotically while the cavities are flooded and in parallel with fuel movement and other activities, critical path schedule duration can be reduced. The self-propelled Remotely Operated Vehicle (ROV) -crawler solution does not require the constant use of bridge or crane after deployment. Unlike other robotic decon tools, this system is simple to use and plant personnel can be trained to operate it without the need to bring in outside vendors.
Remotely Operated, Self-Propelled Solution
The robotic decontamination tool deployed for FENOC is a hybrid ROV-crawler platform equipped with an integrated cleaning system. It operates and transitions freely between ROV “flying” mode, and “crawler” mode (for any orientation) with no physical adjustments required to the system. To accomplish this, the tool utilizes a flow-less vortex generator on its chassis that creates up to 60 pounds of suction force to adhere to flat and curved, horizontal and vertical surfaces, including interferences and seams. The crawler system is driven in a simple tank-like “skid steer” fashion and has 26 pounds of traction drive force that provides full control in flow conditions, as well as appropriate umbilical movement. When in ROV mode, six (6) identical brushless DC vectored and vertical thrusters provide versatile maneuverability and positioning.
The tool’s cleaning system is comprised of a shroud enclosing an integrated, fixed-force rotating cylindrical brush assembly connected to an existing vacuum submerged in the cavity, which filters the contaminated particulates dislodged by the brush. Rotational speed and downforce are adjustable for optimal performance. The system uses off-the-shelf brushes to keep costs down and the brushes can be exchanged for various abrasive grit sizes depending on the surface and level of cleaning required.
The decon tool also includes independent lighting and multiple camera systems for appropriate situational awareness and navigation. The entire tool utilizes mature, nuclear-proven, and foreign material exclusion (FME)-compliant subassemblies.
Robotic Underwater Decontamination Procedure
Before entering containment, the Diakont field engineer team completed an FME pre-check on the decon tooling and cables in a staging area. Once completed, the team set up the ROV-crawler control station on the refueling floor away from the edge of the refueling cavity, in a lower-dose space separate from other outage operations. After a complete system function check, the decon tool was connected to the vacuum pump in the cavity. The tool was then deployed into the water using the overhead crane, taking precaution to minimize disruption to the water surface. The team then cleared the shroud cavity of air bubbles by cycling the vacuum pump power, such that the vehicle was appropriately trimmed. The final step was the deployment of a high definition camera into the cavity to monitor decon operations and umbilical location from a bird’s eye perspective, to support the operator’s situational awareness.

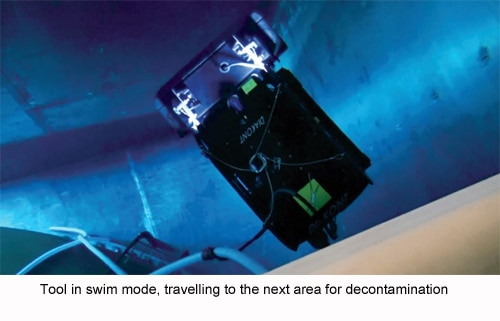
The robotics operator navigated the decon tool in “flying” mode close to the wall and positioned the tool so either the port or starboard side was close to the wall. Then the operator rotated the tool until the track wheels touched the cavity wall and activated the flow-less vortex generator to adhere to the wall. The robotics operator next initiated the brush operation and performed surface cleaning by traversing up and down the wall in an overlapping manner, similar to vacuuming a carpet, while using the onboard and bird’s eye view camera to identify any obstacles in the way. A second operator, as needed, was positioned near the cavity edge and supported umbilical cable management.
After performing the decontamination passes on the first wall, the robotics operator disengaged the tool from the wall and operated the ROV in “flying” mode to navigate to the next area within the refueling cavity. This robotics operator repeated this procedure until all of the walls and floor were decontaminated. This particular decontamination project also included the curved surfaces of the drywell head. The decon tool’s brush speed varied in each section based on the level of debris – slower speeds were employed in areas with high levels of debris to avoid excessively disturbing the material. Field engineers monitored the process to ensure that the vacuum shroud effectively captured the dislodged debris. During this process, the robotics operator demonstrated the controls to plant personnel and had them operate the tool as well.
Immediately following the decontamination procedure, the field team prepared a staging area near the cavity edge with a containment receptacle and the necessary tools for decontaminating the decon tool and performing the brush removal. With the assistance of a plant crane operator, field engineers used the overhead crane with a pneumatic hook to hoist the decon tool out of the water and into the containment receptacle. To remove the excess water from the hose, technicians then turned on the pump momentarily before disconnecting the vacuum hose from the ROV
Finally, the field team cut off the consumable crawler treads and removed the brush from the shroud – these items along with disposable personal protective equipment (PPE) and wiping rags were the only radwaste from the decontamination procedure. Changing the brush out is very simple, requiring only two hand knobs to remove. Once the decon tool was wiped dry, the system was packed in an LSA (spell out) transit case per the site requirements.
Decontamination Results
At the Spring 2017 refueling outage at Perry Nuclear Power Plant, decontamination services were so effective that no additional manual cavity decon was required after drain-down. Using the tool’s ability to swim, attach, and crawl, Diakont decontaminated surfaces designated by the plant operator. Preliminary surveys indicated that all contamination levels were reduced to <50K dpm/100 cm2, helping the utility meet their INPO/Industry collective radiation exposure goals.
Additionally, the tool is modular and can be used without the brush assembly to perform visual inspections and can also be configured with different attachments to support many other underwater applications. Plant personnel at Perry Nuclear Power Plant are planning on using the tool to examine underwater boots next summer in the suppression pool.

