
Diakont Advanced Technologies successfully used a robotic crawler to inspect the condition of unpiggable natural gas pipelines running underneath the Hudson River for pipeline operator Williams. This robotic crawler uses rugged track systems to traverse difficult pipe geometries and inspect lines that are inaccessible to traditional flow-driven, smart pig tools.
Challenge
- Inspect the condition of an unpiggable natural gas pipeline running underneath the Hudson River for pipeline operator Williams.
Solution
- Implement Diakont’s robotic crawler to inspect the interior of the challenging pipeline.
Results
- The pipeline inspections went smoothly, the lines were in excellent condition and completed ahead of schedule. Williams took advantage of the inspection crews extra availability and arranged another inspection for a 8000’ pipeline that was beyond the original project scope.
New Urban Development Creating HCA
Construction of new apartment buildings and condominiums within urban areas creates new high consequence areas (HCA) in existing pipelines. Some of the unpiggable pipelines within these HCAs have never been inspected using inline inspection tools and now require integrity management programs from the Pipeline and Hazardous Materials Safety Administration (PHMSA). This was the situation that Williams faced when new apartment buildings were constructed on the edge of the Hudson River near Williams’ Transco pipeline system in New Jersey.
Self-Propelled Solution
The HCA piping inspected by Williams consists of two 24” lines running parallel to each other underneath the Hudson River. With no external access to the pipeline, Williams integrity engineers turned to in-line inspection solutions. Compounding the inspection challenges, Williams only had access to the pipe on one side of the Hudson River, so the inspection tool would have to enter and exit the pipe from the same location, ruling out traditional smart pigs, which require retrieval from the end of the line following inspections.
Williams identified Diakont’s robotic crawler as a potential solution to meet the inspection challenges. The bidirectional crawler employs three tank-like tracks: two at the bottom of the tool for primary propulsion, and a third upper track that extends out as necessary to stabilize the tool in difficult geometries such as bends and inclined pipes.
Diakont’s robotic crawler uses an integrated sensor suite to assess pipe wall integrity:
- An ultrasonic testing (UT) electromagnetic acoustic transducer (EMAT) measures pipeline wall thickness.
- A laser profilometer (LPM) creates detailed mapping of the pipeline’s inner surface, as well as detects and measures internal surface irregularities such as pitting.
- High-definition cameras allow technicians to gather photographs and video of the appearance of the pipeline’s interior.
Unlike conventional UT instruments that require a liquid couplant between the transducers and pipe body to transmit ultrasonic signals, the EMAT instrument does not require any couplant, making it ideal for gas pipeline inspections where adding liquid within lines is avoided at all costs. All sensor data feeds back to the inspection technicians in real time via an umbilical cable and pipeline operators are given same-day assessment results.
After a live demonstration of the robotic crawler’s capabilities in a 24” pipe mockup, Williams selected Diakont’s robotic crawler for the urban pipeline inspection.
In-Line Inspection
Williams prepared for inspection operations by removing tees in the valve yard near the edge of the Hudson River to create access points for each buried pipeline. Williams also installed temporary vertical leg sections on the pipelines to bring the access points above the water level.

Figure 1. Robotic crawler positioned at access point created on Transco Pipeline
Aside from making the pipeline entry point more accessible, installing the pipe extensions also decreased the risk of getting water in the line during the inspection. After installing the extensions, Williams blew the lines dry to remove remaining product and excess condensation.
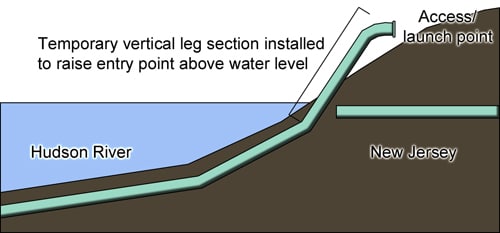
Figure 2. Diagram of extension legs installed on gas lines to raise access point above water level
Diakont mobilized two inspection teams with two robotic crawler tools to inspect the twin gas lines simultaneously and minimize pipeline downtime. Both of the robotic crawlers were hand-loaded into the pipes and driven through the entire inspection length while taking video of the interior and surveying pipe elements. Technicians then reversed the crawlers back to the launch point and exchanged the high-definition video modules for EMAT sensors to inspect the pipe in autoscan mode. After completing the automatic scan, inspection technicians manually drove the robotic crawlers to every indication of a potential defect for detailed characterization. Throughout the inspection, NDE data analysts reviewed the resultant data in real time, monitored tool operation via telemetry, and recorded precise pipeline geometric data, which was incorporated into a pipe tally in the pipe feature list report.
Inspection Results
The pipeline inspections went smoothly and the lines were completed ahead of schedule. Williams took advantage of the extra availability of the inspection crews and arranged inspection of an additional 800’ of pipeline beyond the original project scope.

Figure 3. Inspection site photo with robotic crawlers deployed into the twin gas lines
The integrity assessment of the Transco pipeline sections showed the pipe to be in excellent condition. The only abnormalities uncovered during the inspections were a few small pieces of wax on the lower region of the pipe. The following pictures of this wax (see Figure 4) were taken by the inspection crew during the initial pipeline survey using the tool’s high-definition camera.
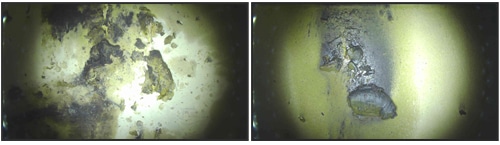
Figure 4. Wax found in the lower regions of the pipeline
With the pipeline integrity validated, Williams made plans to put the pipeline back in service. Williams also made plans to install permanent tees to the pipelines to facilitate future inspections without requiring any excavation or temporary leg installations. According to James Harrison, manager at Asset Integrity, the robotic tool helps solve a problem that has been plaguing the pipeline industry for years. “The smart pig is one of the most crucial tools we have to ensure pipeline integrity. Unfortunately, not all pipes are piggable,” James says. “This new robotic crawler tool gives us access to pipe sections which had never before been candidates for in-line inspection.”
Authors:
Casey Lajaunie, Supervisor, Asset Integrity at Williams and
Jonathan Minder, ILI Solutions Engineer at Diakont


