
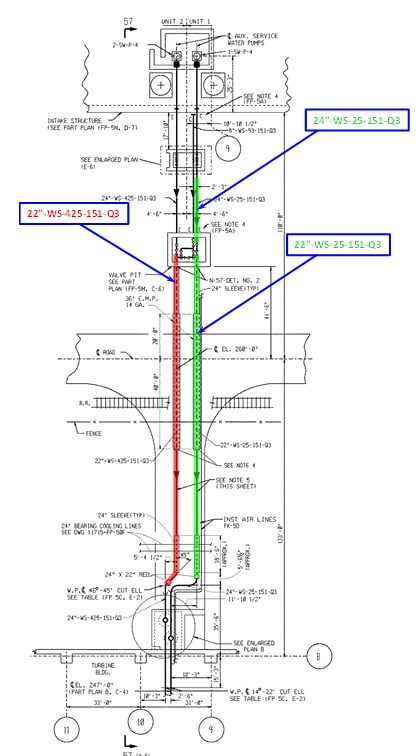
A team from Dominion Energy’s North Anna Power Station used Diakont’s robotic in-line inspection system (RODIS) crawlers to visually and volumetrically inspect auxiliary service water piping. These two lines provide an auxiliary feed from Lake Anna to the plant’s Service Water Reservoir. Portions of these lines were replaced in 1995, and the new 22” lines were sleeved through the two remaining 24” lines; therefore, excavation and visual inspection was not possible. To add additional challenges, these 22”-diameter lines are buried beneath a service road and a railroad track. Both lines have an internal ARC 855 multifunctional epoxy coating with a dry film thickness of 30-40 mils. The pipeline geometry included a concentric reducer that permits the 22” piping to connect to the remaining 24” piping which continues to the station’s turbine building. The team launched the RODIS tool via a valve pit near the intake structure at the edge of the lake. Figure 1 shows a diagram of the inspection area, with the areas inspected highlighted: the Unit 1 ASW line segments in GREEN and the Unit 2 ASW line segment in RED.
Challenge
- Visually and volumetrically inspect Dominion Energy’s North Anna Power Station’s auxiliary service water piping.
- The two lines were 22” in diameter and buried beneath a service road as well as railroad tracks, making them difficult and unpiggable.
Solution
- Implement Diakont’s RODIS crawler with three NDT inspection technologies. This eliminates the need for excavations and personnel pipe crawls while providing a complete volumetric exam of the pipe wall, enhancing station reliability and safety.
Results
- Diakont technicians successfully inspected a total of 141.9’of the pipeline.
- No anomalies were found within the pipe that exceeded Dominion’s reporting threshold of 12.5% wall loss, and the pipeline was put back into service following the inspection.
The specified primary objective of the inspection was to detect, characterize, and quantify the actual pipe wall thickness, any volumetric defects, and any internal or external corrosion in the inspection areas of the pipes. The secondary objectives were to detect and measure other anomalies of interest in the same areas as well as survey pipeline as-built features. The most important features of the EMAT technology is that the internal protective coating did not have to be removed for the inspection and a couplant was not required between the transducers and the substrate.
Robotic In-Line Inspection Tool
The Dominion Energy team selected an advanced robotic crawler that uses dual base tracks to navigate horizontal surfaces and a single top track to stabilize the crawler. The top track extends to the top of the pipe for additional traction while inspecting difficult pipe geometries such as vertical sections. An umbilical cable connected to a central control station provides power, real-time data collection, and control of the crawler’s tracks and sensor suite. A steel retrieval cable is also connected to the back of the tool for extraction in the event of a power failure.
- The RODIS crawler used at the North Anna Power Station employed three NDT inspection technologies:
- EMAT ultrasonic testing sensors to measure pipeline wall thickness and locate corrosion damage on both the OD and ID. Figure 2 illustrates the operating principles of EMAT.
- A laser profilometer to make a detailed map of the pipeline’s inner surface, including pitting corrosion and other irregularities, and take fine measurements of individual internal diameter (ID) anomalies.
- A video camera suite to create a video record of the pipeline’s interior.
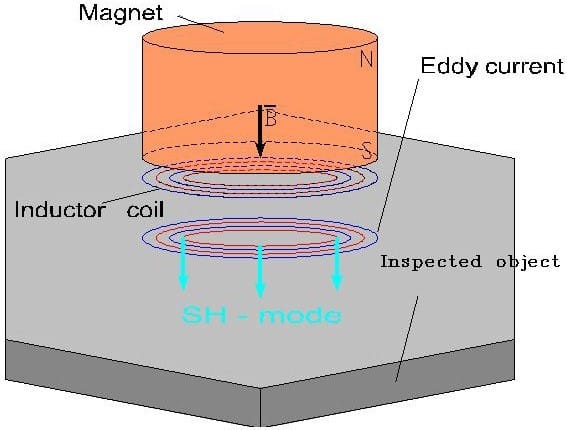
Unlike conventional UT instruments, EMAT sensors do not employ a couplant to transmit signals between the transducers and the pipe wall, making it ideal for pipeline inspections where foreign materials within lines are avoided at all costs. Diakont technicians configure a working gap between the EMAT transducers and the pipe wall before launching the tool to ensure optimal signal quality.
All sensor data feeds back to the inspection team in real time, allowing technicians to provide pipeline operators with same-day assessment results. The EMAT sensor used for this job was a specialized version with stronger magnetic fields to scan through the epoxy coating, as traditional EMAT sensors could not achieve adequate signal integrity.
Pre-Inspection Procedure
Before starting the project, the Dominion Energy team brought the Diakont inspection technicians onsite to receive industry-standard training and perform a site walk down. After analyzing the project parameters and pipeline geometries, Diakont technicians selected an appropriate RODIS crawler and NDT sensor suite to accommodate the inspection objectives. Diakont and Dominion also worked together to establish a personnel and safety plan.
In-Line Inspection
Diakont mobilized equipment onsite on the morning of August 4th, 2017 and performed system checks, including robot functions and NDT sensor calibration.
Dominion personnel used a crane to remove the concrete lid covering the valve pit to gain access to the auxiliary service water pipe system. Dominion then removed a valve from the area of interest and installed a blind cover on the pipe opening leading to the lake. A pipeline cleaning company performed a high-pressure water cleaning of the pipeline to remove any debris.
Diakont technicians hand-loaded the RODIS crawler into the pipe for a visual survey of the entire inspection length – recording video of the interior and surveying pipe elements. After the visual survey, technicians returned the crawler to the launch point and installed EMAT sensors to volumetrically inspect the pipe in automatic scan mode. Inspection technicians also manually drove the RODIS crawler to every indication of a potential defect for detailed characterization. Throughout the inspection, NDT data analysts reviewed the resultant data in real time, monitored tool operation via telemetry, and recorded precise pipeline geometric data, which was incorporated into a pipe tally in the pipe feature list report.

OLYMPUS DIGITAL CAMERA
Unlike conventional UT instruments, EMAT sensors do not employ a couplant to transmit signals between the transducers and the pipe wall, making it ideal for pipeline inspections where foreign materials within lines are avoided at all costs. Diakont technicians configure a working gap between the EMAT transducers and the pipe wall before launching the tool to ensure optimal signal quality.
All sensor data feeds back to the inspection team in real time, allowing technicians to provide pipeline operators with same-day assessment results. The EMAT sensor used for this job was a specialized version with stronger magnetic fields to scan through the epoxy coating, as traditional EMAT sensors could not achieve adequate signal integrity.
Pre-Inspection Procedure
Before starting the project, the Dominion Energy team brought the Diakont inspection technicians onsite to receive industry-standard training and perform a site walk down. After analyzing the project parameters and pipeline geometries, Diakont technicians selected an appropriate RODIS crawler and NDT sensor suite to accommodate the inspection objectives. Diakont and Dominion also worked together to establish a personnel and safety plan.
In-Line Inspection
Diakont mobilized equipment onsite on the morning of August 4th, 2017 and performed system checks, including robot functions and NDT sensor calibration.
Dominion personnel used a crane to remove the concrete lid covering the valve pit to gain access to the auxiliary service water pipe system. Dominion then removed a valve from the area of interest and installed a blind cover on the pipe opening leading to the lake. A pipeline cleaning company performed a high-pressure water cleaning of the pipeline to remove any debris.
Diakont technicians hand-loaded the RODIS crawler into the pipe for a visual survey of the entire inspection length – recording video of the interior and surveying pipe elements. After the visual survey, technicians returned the crawler to the launch point and installed EMAT sensors to volumetrically inspect the pipe in automatic scan mode. Inspection technicians also manually drove the RODIS crawler to every indication of a potential defect for detailed characterization. Throughout the inspection, NDT data analysts reviewed the resultant data in real time, monitored tool operation via telemetry, and recorded precise pipeline geometric data, which was incorporated into a pipe tally in the pipe feature list report.


